
CS234 Winter 2019 3강
- Model-Free Policy Evaluation 공부
강의 슬라이드 : http://web.stanford.edu/class/cs234/schedule.html
기록을 위한 것이지 보여지기 위한 것이 아닙니다.
RL 초보자이기 때문에 이해한 것이 정답과 다를 수 있습니다.
Copyright to Stanford CS




0~1 사이의 수인 Gamma, discount factor를 이용했음

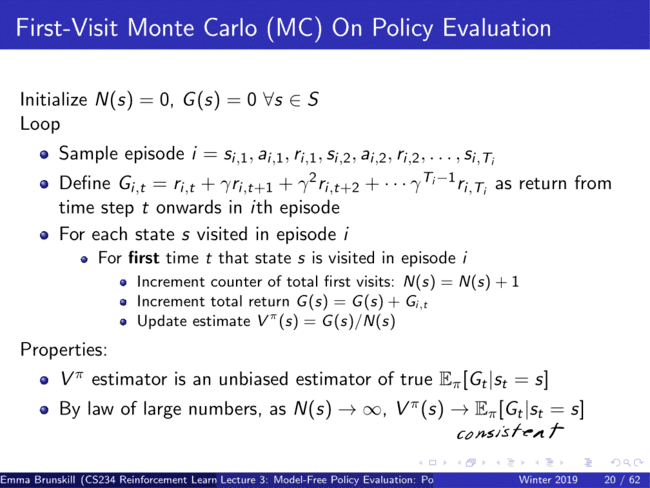
dynamic programming을 통한 정책 평가 Policy Evaluation
dynamics와 transition은 이 수업에서는 상호교환이 가능한 의미
vector인 value function을 0으로 초기화한 후에 유한한 상태와 행동을 수반한 반복
given dynamics/transition reward model r
$|V_k^{\pi} - V_{k-1}^{\pi}| < \epsilon$
k가 클 때 상당히 좋은 예측치를 나타냄
반면 k=1 나쁜 결과를 얻게될 것





value function is a stationary quantity





많은 반복과 estimate 추정치를 통해 나 자신을 평가
MDP의 존재 유무에 큰 영향을 받지 않음
trajectory 탄도, 궤적, 궤도








우리가 직접 방문한 곳에 대해서만 1
2번 방문한 S2에 대해서는 1
s3,s2,s1에 대해서 update
정리하면 아래와 같다
예시의 Trajectory 경로는 s3->s2->s2->s1->terminal 종료지점
이 때의 Value를 구하는 방법은 아래와 같다($\gamma=1$)
거꾸로 계산해야하기 때문에
$S_1 : G_{i,1}=1, S_2:reward_2+\gamma G_{i,1} =0+1= 1, S_2:reward_2+\gamma G_{i,2}=0+1=1, S_3:reward_3 + \gamma G_{i,2}=0+1=1$
결과적으로 위의 First visit MC estimate of V의 각 상태는 위와 같다.
다만 주의점은 S2의 경우 처음의 state에 대해서만 표기를 해야한다.
Every Visit MC estimate of S2의 경우는 모든 state에 대해서 estimate를 해줘야한다.
때문에 Value의 값은 아래와 같이 계산한다.
$S_2 : {2 \over 2}$
분자의 2는 처음 $V(S_2)$와 두 번째 $V(S_2)$의 합을 뜻한다. 때문에 1+1=2
분모는 두 번의 $S_2$의 state 개수를 의미한다. 이는 N(s)를 의미한다.





Temporal Different Learning은 Monte-Carlo와 Dynamic Programming을 합친 방법으로
Model-Free이며 BootStrap
즉각적인 업데이트 Immediately updates들은 그 지식을 바로 사용할 수 있는 장점이 있음


proxy 1. 대리(권) 2. 대리인 3. (측정·계산하려는 다른 것을 대표하도록 이용하는) 대용물





consistent vs being unbiased estimator



TD some bias, much lower variance than MC
zero converge with tabular representations
-> not always converge once
tabular 표로 나타낸



MC : V(A) = 0 there's only one trajectory we have an A and it got a zero reward.
TD : V(A) = 3/4 bootstrap the value from A.


t = time step을 의미한다.






