
CS234 Winter 2019 4강 - Model-Free Control 공부
강의 슬라이드 : http://web.stanford.edu/class/cs234/schedule.html
기록을 위한 것이지 보여지기 위한 것이 아닙니다.
RL 초보자이기 때문에 이해한 것이 정답과 다를 수 있습니다.
더불어 한 번에 완성되는 글이 아니기에 글이 없을 수도 있음을 알려드립니다.
Copyright to Stanford CS & Emma brunskill
순서
1. Generalized Policy Iteration
2. Importance of Exploration
3. Monte Carlo Control
4. Temporal Difference Methods for Control
5. Maximization Bias







s1 a1 s1 a1
s1 a2 s1 a2
결합시켜 s1 a1 s1 a2와 같은 경로를 만들어 낼 수 있음
이전 정책들로 경험해보지 못한 경로들을 가기 때문에 다름
Q-learning 때 다시 설명할 것
기존의 경로 trajectory 기반으로 새로운 경험을 할 수 있도록 한다.
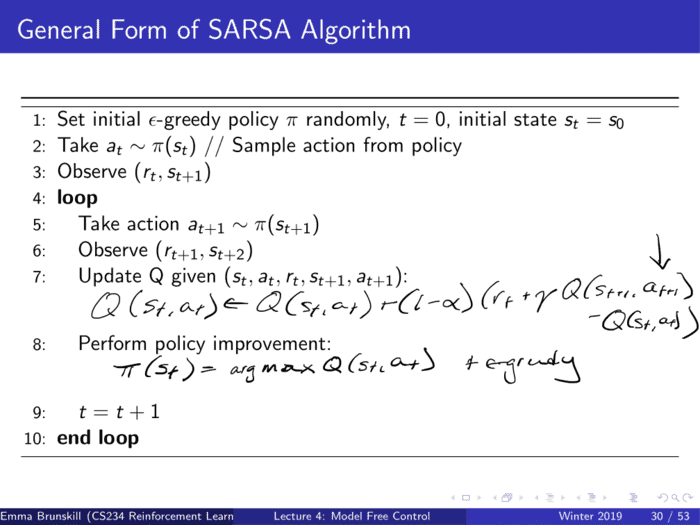
뒤에 나오지만 SARSA는 On-policy, Q-Learning은 Off-policy
cf) MC는 On일수도 Off로 정책을 수립할 수 있다.






후에 나오는 epsilon을 통해 deterministic greedy 방식으로 한쪽으로만 가는 것을 방지함



뒤에서 부터 판단해야하므로 s1에 대한 a1부터 차례로 넣어야함






Q(,a2) = [0100000]
pi greedy 1 2 1 tie
tie는 어떤 것을 넣어도 무관하다는 의미
k=3 epsilon=3





1의 질문은 TD일 때의 장점을 알아보는 것
2의 질문은 MC에 대한 장점을 바라보는 것 : variance가 증가하기 때문에 느림









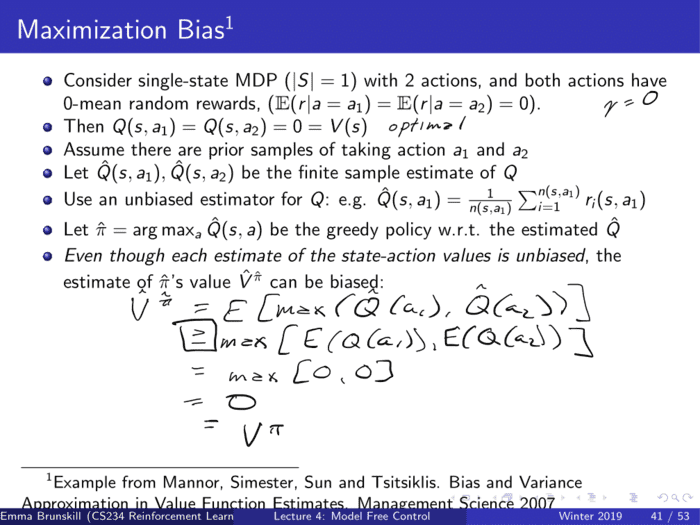
이를 방지하기 위한 것이 Double Q, DQN



Q2 Q Estimate Prediction


오른쪽으로 가는 것이 무조건적으로 좋지만 왼쪽을 먼저 선택했을 때 음수의 경우에 대해 오른쪽으로 가게 설정하는 것을 기본 토대로 한다.
이 때 Double Q-Learning의 성능이 훨씬 좋다. 빠르게 오른쪽으로 가게 만든다.










